Будьте всегда в курсе!
Узнавайте о скидках и акциях первым


Основные нозологии, с которыми пациентов направляли в отделение в 1995-2014 годах: различные формы детского церебрального паралича и перинатальная патология - 3705 человек, последствия поражения периферической нервной системы – 757, последствия черепно-мозговой травмы и травм спинного мозга – 704, последствия лечения по поводу опухолей центральной нервной системы - 412; последствия нарушений мозгового кровообращения - 341. а также различная патология опорно-двигательного аппарата (сколиоз, болезнь Легга-Кальве-Нертеса, врожденные деформации грудной клетки п др.).
В 1995-2010 годах отделение было научной базой кафедры реабилитации и спортивной медицины Российского национального исследовательского медицинского университета им. П.П. Пирогова, а с 2011 года стало научной базой кафедры реабилитологии и физиотерапии РНИМУ. На базе отделения проведены исследования в рамках выполнения 14 диссертаций на соискание ученой степени кандидата медицинских наук, трех диссертаций на соискание ученой степени доктора медицинских наук. Опубликованы 90 научных работ, и том числе в журналах, рецензируемых ВАК, зарегистрированы три патента.
Отделение тесно сотрудничает с кафедрами РНИМУ смежных специальностей (неврологии, педиатрии и детской хирургии), с научными и лечебными учреждениями, занимающимися проблемами реабилитации детей. Сотрудники отделения в течение многих лет ведут активную научную работу, основное направление которой - разработка высокотехнологичных комплексных кинезотерапевтических методик (внедрено 109), ведущие среди них - Баланс, Войта, поприоцептивного нейрофасцикуляторного проторения (PNF), физиотерапевтических методик (внедрено 36) и роботизированного оборудования (платформа Галилео, стабилоплатформа, Армео, Теравитал, вертикализатор Gazelle)
В логопедическом направлении работы отделения внедрены 54 новые методики, способствующие успешному формированию неречевых и речевых функции. В психологическую реабилитацию детей включены 40 новых методик.
Одним из последних исследований стало изучение влияния тренинга на основе применения роботизированного комплекса «Системы для локомоторной терапии». При всем многообразии проявлений у детей с ДЦП основной клинический признак заболевания -двигательные расстройства, в основе которых лежат нарушения произвольной моторики. Механизмы ходьбы и поддержания равновесия (постурального контроля) тесно связаны между собой, но не совпадают. Поэтому при различных заболеваниях, вовлекающих те или иные структуры ЦНС, они могут страдать в разной степени, что зачастую предопределяет специфику нарушения ходьбы и требует особого подхода к реабилитации.
Наиболее удачной следует признать попытку построить классификацию нарушений ходьбы, основываясь на идеях Н.Jackson об уровнях поражения нервной системы: он соотносит нарушения ходьбы с тремя уровнями поражения нервной системы. К расстройствам низшего уровня отнесены нарушения ходьбы, вызванные поражением костно-суставного аппарата и периферических нервов, а также нарушением сенсорной афферентации; к расстройствам среднего уровня - нарушения ходьбы, вызванные поражением пирамидных трактов, мозжечка, экстрапирамидных структур. Расстройства высшего уровня включают сложные, интегративные нарушения двигательного контроля, которые невозможно объяснить поражениями низшего и среднего уровней. Эти расстройства ходьбы можно также обозначить как первичные, поскольку они вызваны непосредственно нарушением выбора и инициации локомоторных и постуральных синергий, а не их реализации, и не зависят от какой-либо иной неврологической патологии.
В связи с тем, что наиболее часто нарушение функции ходьбы является одним из самых тяжелых проявлений заболевания у детей с ДЦП обучение этой функции или коррекция при ее неправильном формировании имеет огромное значение. Одно из динамично развивающихся в последние годы направлений реабилитации - роботизированная механотерапия, по сути, это одна из форм лечебной физкультуры (ЛФК).
Существует несколько вариантов электромеханических роботизированных механотренажеров, симулирующих ходьбу: по типу подвижных опор дли стоп (Gait Trainer GTI, Haptic Walker, LokoHelp), ассистирующих роботов (локомотороботов) - многие из которых, экспериментальные. Принцип работы ассистирующих роботом основан на локомоторных тренировках.
Впервые научные работы, описывающие лечебный эффект локомоторной терапии для больных со спинальными травмами, появились в 2000 году. В работах Сьюозан Харкемы описана суть локомоторной тренировки (ходьбы на тредмиле), цель которой - заново научить больных ходить, используя способность спинного мозга генерировать необходимые импульсы к мышцам ног в ответ на правильные сенсорные сигналы с применением системы поддержки веса тела (body weight support and treadmill system - BWST) и тредмила. Сделать шаг пациенту помогали руки врачей-инструкторов. Таким образом нервная система заново распознавала двигательные схемы, ассоциированные с ходьбой. Локомотороботы заменили труд и участие инструкторов в механическом передвижении конечностей при локомоторных тренировках. Одно из очевидных преимуществ ассистирующих роботов - их способность точно контролировать правильность траектории движения.
В отечественной и зарубежной литературе приведены результаты использования системы «Lokomat» и Gait Trainer у пациентов с ОHМК, системы «Lokomat» - у детей с ДЦП. Есть данные ой использовании и других роботизированных систем (NF- Walker) для лечения детей с ДЦП.
Первый российский аппарат роботизированной механотерапии, направленной на восстановление физиологического стереотипа ходьбы «Система для локомоторной терапии» («СЛТ»), аналог зарубежного аппарата «Lokomat», «СЛТ» состоит из движущейся дорожки, коленоупоров, с помощью которых осуществляется роботизированный акт ходьбы по дорожке, и подвесной системы компенсации веса, обеспечивающей снижение нагрузки на конечности, облегчая тем самым ходьбу у пациенток, не способных ходить в обычных условиях с полной массой тела. «СЛТ» может применяться и без использования вертикальной поддержки в отличии от зарубежного аналога.
«СЛТ» имеет и ряд других особенностей, в частности иной механизм передвижения конечностей по беговой дорожке, более физиологичный с точки зрения биомеханики движения по сравнению с зарубежным аналогом и соответствующий принципам локомоторной терапии, отсутствие жесткой фиксации таза, автоматическая синхронизация скорости движения беговой дорожки со скоростью ходьбы пациента.
Разработка новых технологий, использующих комплексное воздействие современных кинезотерапевтических методик и применение ассистирующих роботизированных комплексов, крайне важна и перспективна. Актуальность данного исследования обусловлена, с одной стороны, распространенностью среди неврологических патологии спастических форм ДЦП, а с другой - отсутствием научно обоснованных комплексных реабилитационных методик, включающих кинезотерапию на основе применения методики проприоцептивного нейрофасцикуляторного проторения, физиотерапевтическое воздействие с использованием аппарата электроимпульсной высокотоновой терапии HI-Top184» и тренинг на основе использования современного роботизированного комплекса, представляющего собой тредмил с роботизированным механизмом ходьбы.
Объектом данного исследования стали 38 детей с ДЦП в форме спастического гемипареза в возрасте от 10 до 16 лет, поступивших в процессе плановой госпитализации в отделение восстановительного лечения Российской детской клинической больницы. Методом рандомизации пациенты были разделены на две группы, сопоставимые по возрасту и полу: основная - 20 детей, группа сравнения 18.
Все пациенты были обследованы до и после проведения реабилитационного курса с использованием стандартных клинических методов: сбор анамнеза, описание клинического состояния, оценка мышечного тонуса по Ашфорту, проба сохранения равновесия и пальценосовая координатные пробы, оценка по шкале GMFM, определение скорости ходьбы.
В основной группе в состав реабилитационной программы входили 15 тренировок с использованием роботизированной «СЛТ», кинезотерапия на основе применения методики проприоцептивного нейрофасцикуляторного проторения, занятия на механотренажере Theravital и физиотерапевтическое воздействие с использованием аппарата электроимпульсной высокотоновой терапии HiTop84» (10 процедур). Физиопроцедуры проводили по антиспастической методике с модулирующей частотой 0,1-1,5 Гц.
Время локомоторной тренировки на «СЛТ» нарастало по мере увеличения нумерации процедур: первые две тренировки - 10-15 мин: к середине курса - до 20-30 мин: к концу курса - 30-10 мин.
В группе сравнения реабилитационная программа была аналогичной, за исключением тренинга на роботизированном аппарате «СЛТ»
Мышечный тонус в исследуемых группах контролировали до начала курса реабилитации и через сутки после последней процедуры. Результаты исследования мышечного тонуса в основной группе и группе сравнения у детей с гемипаретической формой ДЦП представлены в таблице
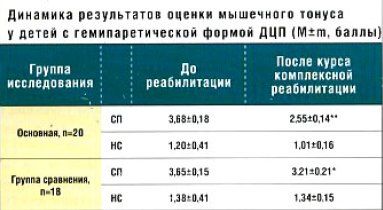
У детей основной группы к окончанию курса реабилитации наблюдалось отчетливое снижение мышечного тонуса (на 30,8%): в группе сравнения - выраженная тенденция к снижению тонуса (на 10.7%). Снижение тонуса регистрировали как на пораженной, так и па непораженной стороне у детей обеих групп, что свидетельствует о направленном центральном воздействии реабилитационных методик как в основной группе, так и в группе сравнения.
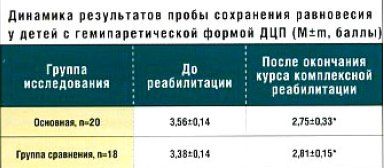
Результаты координаторного тестирования с использованием пробы на поддержание равновесия свидетельлтвуют что у детей с гемипаретической формой ДЦП применение реабилитационных комплексов как в основной группе, так и в группе сравнения привело к статистически значимому улучшению способности сохранять вертикальное положение , но в основной группе этот показатель имел более выраженное изменение - на 8.5% в положительную сторону
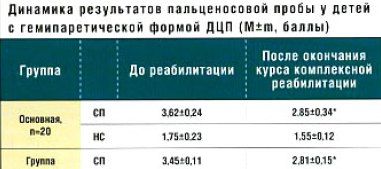
При проведении пальценосовой пробы в вертикальном положении у детей основной группы были отмечены позитивные сдвиги как на стороне поражения, так и на непораженной стороне. В группе сравнения вектор изменений имел аналогичное направление, причем более выраженные сдвиги наблюдались на непораженной стороне.
При проведении теста GMFM-88 у пациента было три попытки проделать движение, оценивали лучшее исполнение двигательного акта. Подсчет результатов осуществляли по 4-баллыюй шкале. На основании полученных результатов пациенты были распределены по четырем уровням двигательной функции. По двигательному статусу у 4 (20%) детей основной группы и у 4 (22,2%) в группе сравнения были определены легкие двигательные нарушения (I уровень); соответственно у 10 (50%) и 12 (06.7%) - умеренные (II уровень); у 6 (30%) и 2(11.1%) выраженные нарушения (III уровень).
У всех детей в обеих группах наблюдалась положительная динамика: в среднем +3.9% по общему баллу GMFM в основной группе и +2,5% в группе сравнения. Максимальная динамика наблюдалась при выполнении заданий в исходном положении стоя (категория 1)): +4.5% в группе сравнения и +8,6% в основной группе. В то же время двигательные возможности детей в обеих группах практически не изменились в положении лежа (в обеих группах - менее 1%). По категориям В (сидя) и С (на коленях) улучшение составило от 3 до 5%, что, вероятно, связано с укреплением мышц спины, живота и нижних конечностей.
Скорость ходьбы определяли как частное от деления расстояния, пройденного ребенком, на показатель времени, определенного за этот период. Средняя скорость ходьбы в основной группе после применения реабилитационного комплекса увеличилась в 1,7 раза, в группе сравнения - в 1,2 раза. Скорость ходьбы в основной группе увеличилась в большей степени в связи с тем, что формирование системы временных связей, образующихся в коре мозга в ответ на осуществление локомоторных тренировок на «СЛТ» вызвало автоматизацию более правильного двигательного стереотипа
Применение комплексной реабилитации с включением тренировок с использованием роботизированной «Системы для локомоторной терапии» в сочетании с электроимпульсной высокотоновой терапией и кинезотерапией по методике проприоцептивного нейрофасцикуляторного проторения способствует снижению мышечного тонуса, улучшению показателей координаторых проб. Результаты теста GMFM и показатели скорости ходьбы свидетельствуют о том, что использование роботизированного оборудования помогает более эффективно восстанавливать функции ходьбы.
Купить СЛТ аппарат локомоторной терапии Вы можете у официального представителя компании ООО "Безбарьерная среда" или заказть по телефону 8 495 133-90-25

")